
About

Robotics Mechanical Engineer with expertise in robot control, automation, AI-infused mechanical systems, and smart manufacturing. Strong background in kinematics, impedance control, force sensing, and trajectory planning. Hands-on experience with Scara Robot for real-time control. Passionate about integrating AI and robotics for intelligent automation solutions.
Download my cvMy Skills
Robot Control
Mechanical Analysis
Programming & Simulation
Industry & Material Knowledge
CAD/FEM Expert
R & D and Energy Analysit
What i do

Mechanical Engineering (Robotics)
Ford Motor Company, California, USA.
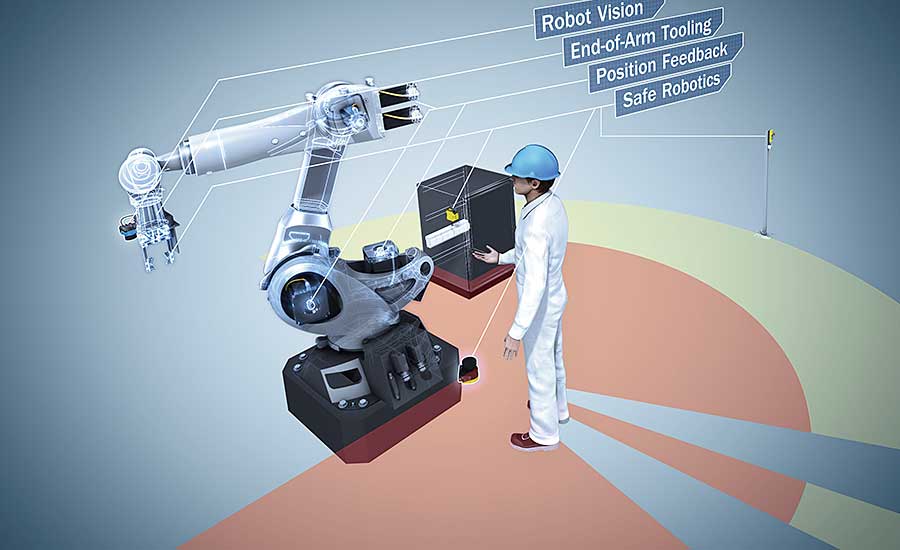
• Worked on "Robotic Arm Integration for Automotive Assembly Line" and "Robotic Vision
System for Defect Detection" using
SolidWorks and CATIA for 3D modeling and robotic cell layout. Simulated paths in
RobotStudio for cycle-time and spatial efficiency.
• Programmed ABB and KUKA robotic arms using RAPID and KRL, collaborating with
automation and controls teams to develop
synchronized robotic movements. Used C++ to refine motion logic and enhance real-time
system response.
• Designed modular robotic end-effectors with integrated force-feedback sensors, using
ANSYS for stress validation and Simscape to
simulate dynamic interaction. Ran alongside tooling and manufacturing engineers for
robustness under varied loads and speeds.

R.&.D Engineer
Goldi Solar PVT LTD, Surat, India.
• Designed and enhanced mechanical assemblies and production tools, improving
manufacturing efficiency and automation by 25%, resulting in smoother operations and
higher throughput within high-volume solar panel
production lines..
• Led validation and verification of mechanical designs through simulation and
real-world testing, ensuring robust performance under
industrial operating conditions.
• Troubleshot mechanical issues on production lines, cutting downtime by 20% through
innovative solutions that addressed recurring design challenges and maintained
continuous production flow.
Conducted Finite
Element Analysis (FEA) to test design
limits, optimizing structural integrity and longevity of custom components and
fixtures.
Collaborated with interdisciplinary teams to standardize processes, boost
productivity, and refine manufacturing techniques for
scalability and cost-effectiveness.
Mechanical Engineer
Divine Engineering Services Pvt Ltd, Surat, India.
• Directed the Design and Fabrication of Custom Material Handling Systems using
SolidWorks for 3D modeling and AutoCAD for technical drawings, ensuring precise design
for material flow, load-bearing capacity, and seamless
system integration into client facilities.
• Utilized SolidWorks for detailed
mechanical design and motion simulations, identifying potential interferences,
optimizing conveyor kinematics, and performing FEA to validate structural strength and
fatigue resistance,
ensuring system reliability and durability.
• Applied AutoCAD to create 2D layouts, detailed schematics, and assembly instructions,
easing clear communication between design, procurement, and fabrication teams for
accurate and efficient fabrication with precise
alignment to production line specifications.

Lab assistant
RTU Design Factory Internship, Riga, Latvia.
• Managed and promoted innovation through new technologies including 3D printing and
laser cutting processes as a means of
prototyping end of arm tooling.
• Enhanced management and communication skills by participating in "Sport Hackathon" and
"3D printing competition" as an helper.
Advice the participants on best practices for 3D printing and laser machining.

Engineering Intern
Industrial Assessment Center (IAC), San Francisco, CA.
• Conducted detailed assessments of energy usage in industrial settings, emphasizing
data-driven insights to improve user experience
and optimize energy consumption across varied operations.
• Worked collaboratively with cross-functional field teams and key stakeholders to
identify inefficiencies in workflows and propose
strategic enhancements for energy savings

Graduate Researcher
San Francisco State University (Robot Control)
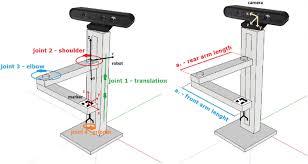
• Developing vision-guided Qunser arm robot for real-time image replication &
force-controlled drawing.
• Utilizing Quarc Simulink for operating Quanser Robot in trajectory and force control.
• Implementing 3D-to-2D image processing, adaptive force control, and automated tool
switching.
My recent Works
{kind=link}